Главная страница » Программное обеспечение » Стандартная система промышленных роботов (ARCS)

программное обеспечение для управления роботами, являющееся ядром всей линейки роботов Пэйтян
Интегрирует модули преобразования протокола шины, компилятор языка AR, кинематику робота, алгоритмы динамики, пользовательский интерфейс и другие
Максимальное управление до 48 осями, охватывая различные алгоритмы компенсации, абсолютная точность позиционирования до ±0.1мм
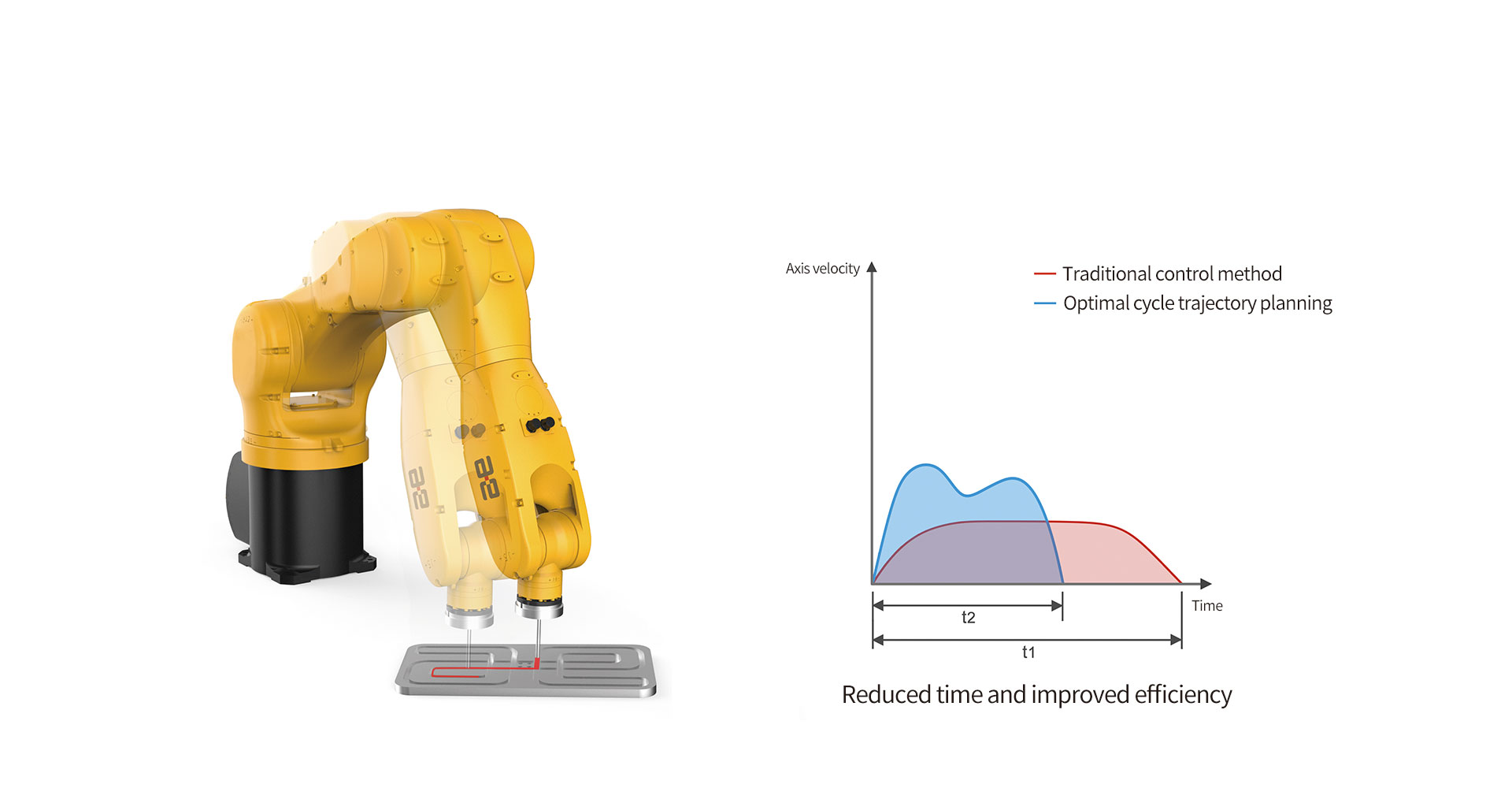
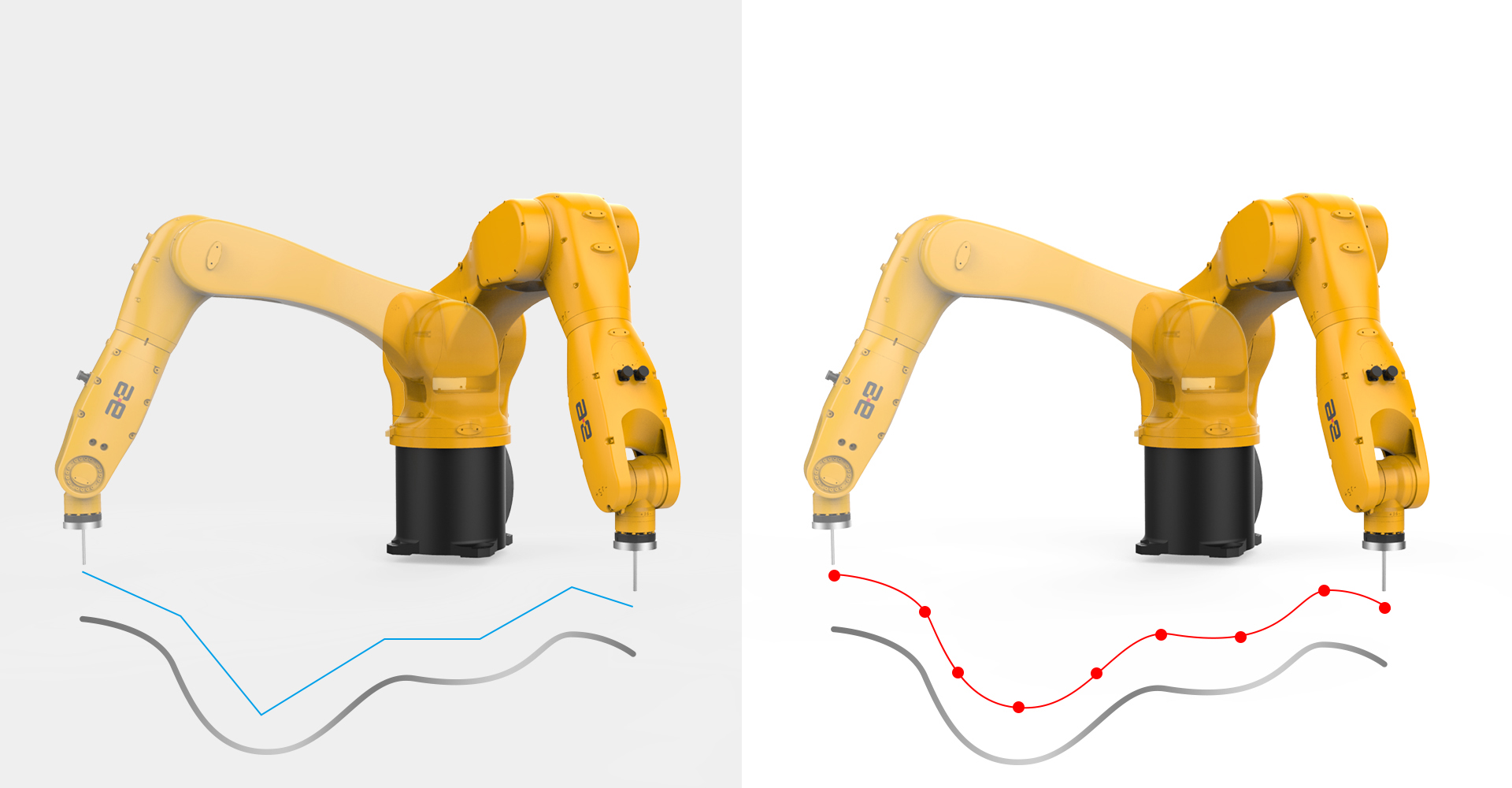
Оптимальное планирование траектории для наилучшей скорости работы
Каждая ось обеспечивает минимальный цикл времени при соблюдении ограничений по скорости, ускорению, скорости ускорения и моменту.
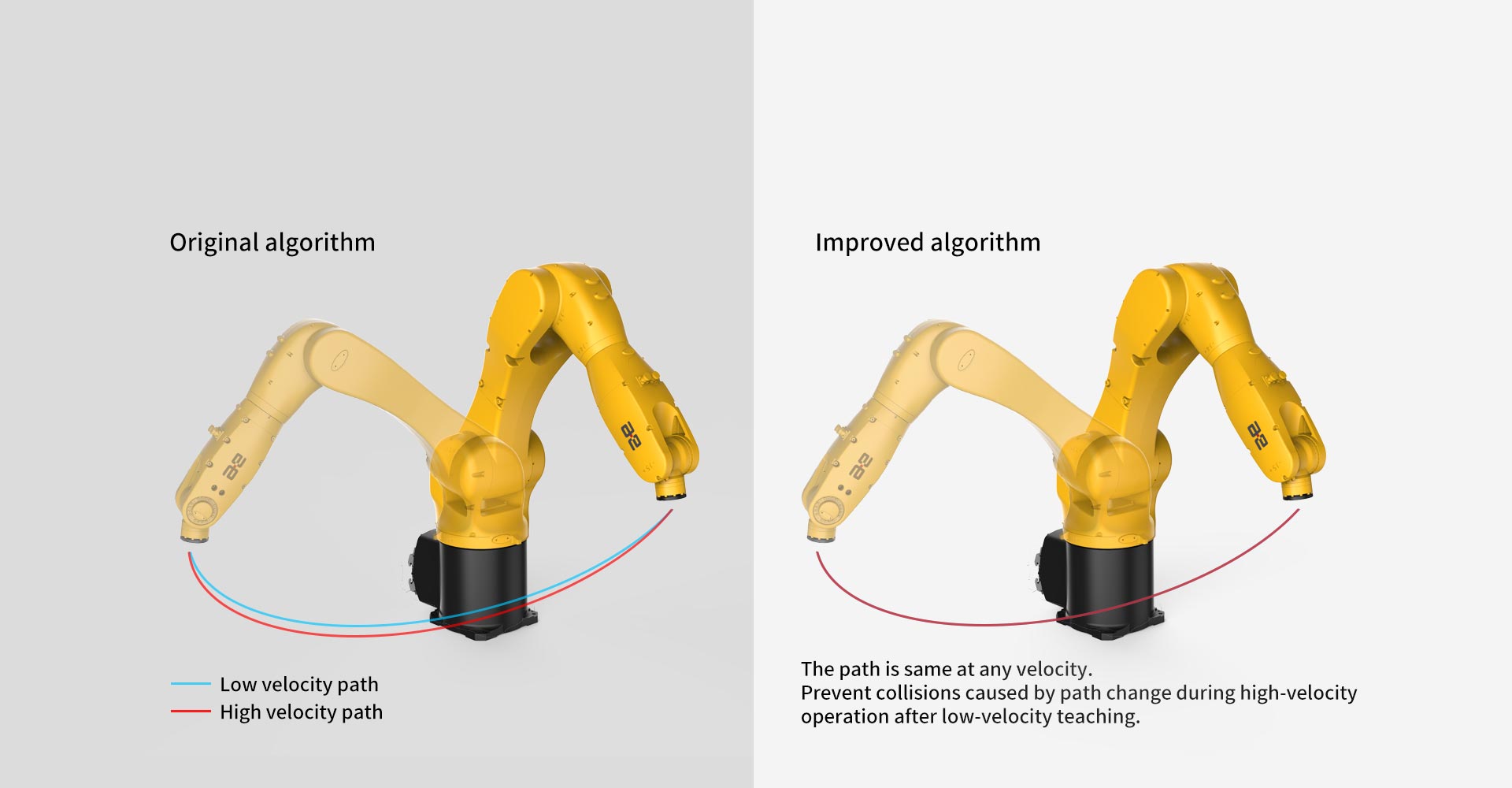
Абсолютное сохранение траектории
При низкой или высокой скорости движения всегда гарантируется точное соответствие фактической траектории траектории программирования
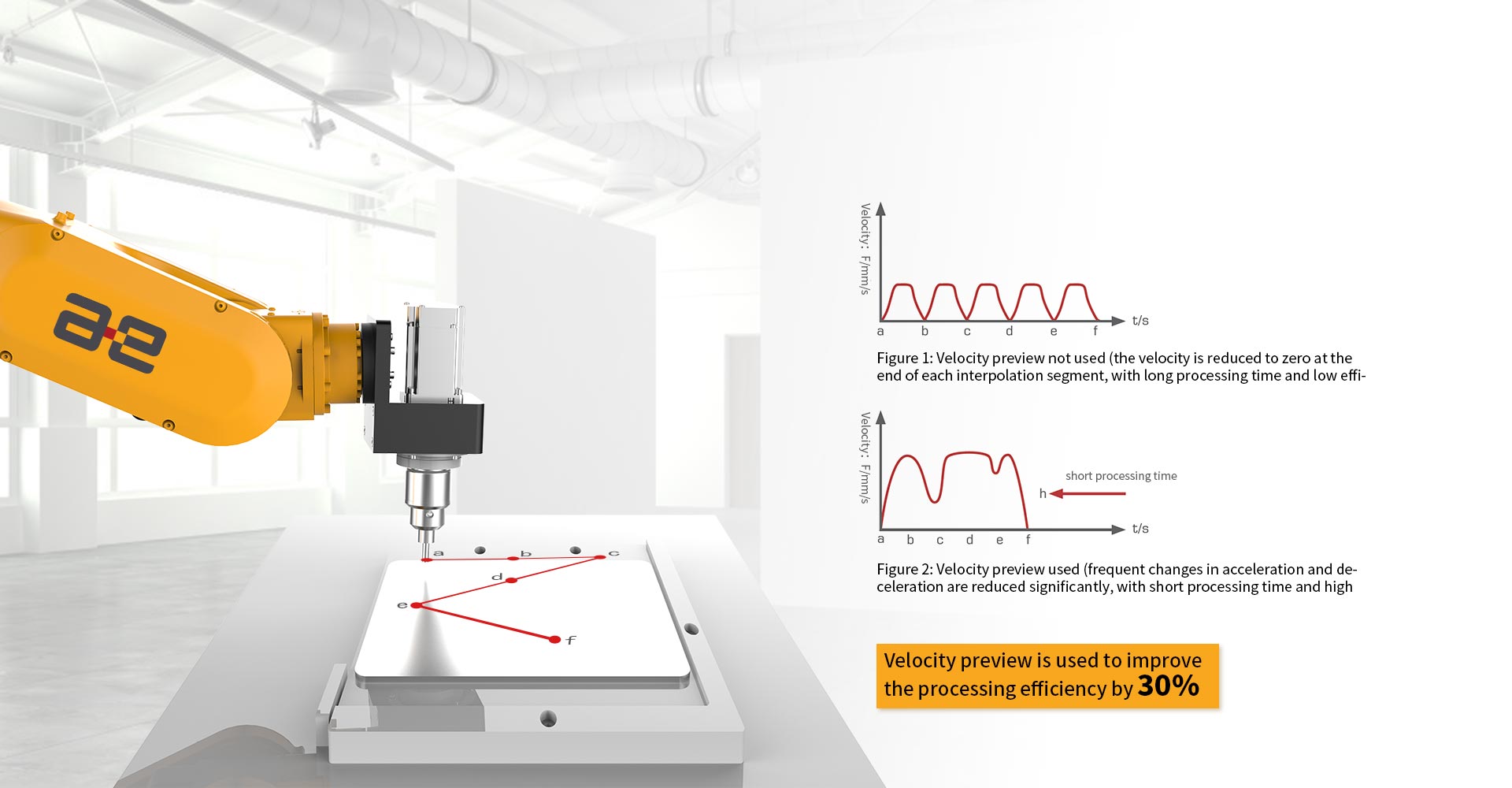
Прогнозирование скорости
Заранее обнаруживается точка перегиба траектории и производится планирование скорости для плавного перехода при высокой скорости
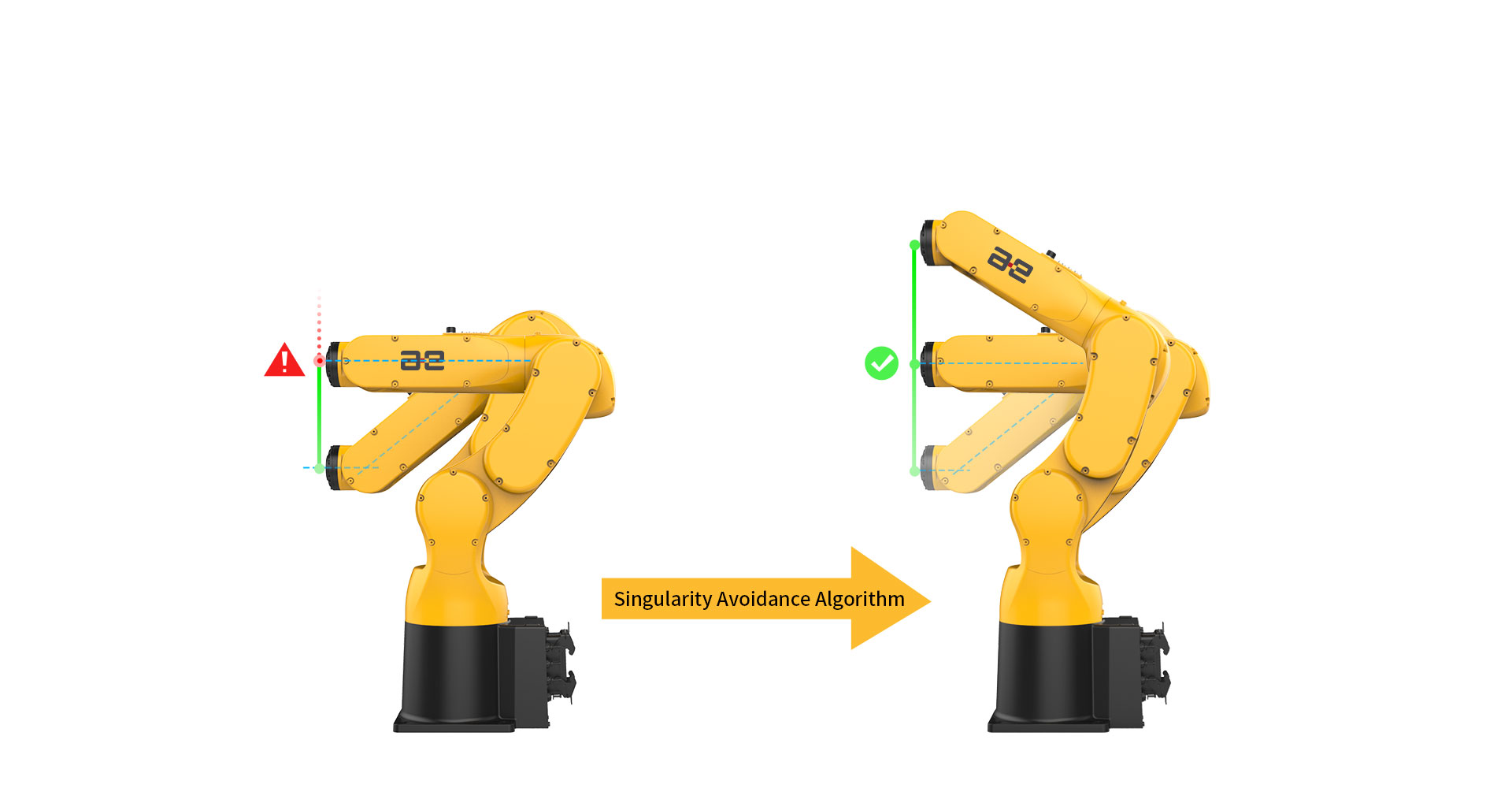
Алгоритм избегания сингулярных точек манипулятора
Решение проблемы слишком высокой скорости сочленений в окрестности сингулярных точек

Обнаружение столкновений
Используя обратные данные о токе и моменте двигателя, чтобы уменьшить повреждения при столкновениях и обеспечить безопасность оператора

Обучение с помощью перемещения
Без использования внешних датчиков, ручное перемещение робота для достижения заданной позы
или выполнения программирования по определенной траектории.
Это сокращает время обучения и программирования, повышает эффективность производства и снижает затраты на эксплуатацию робота.
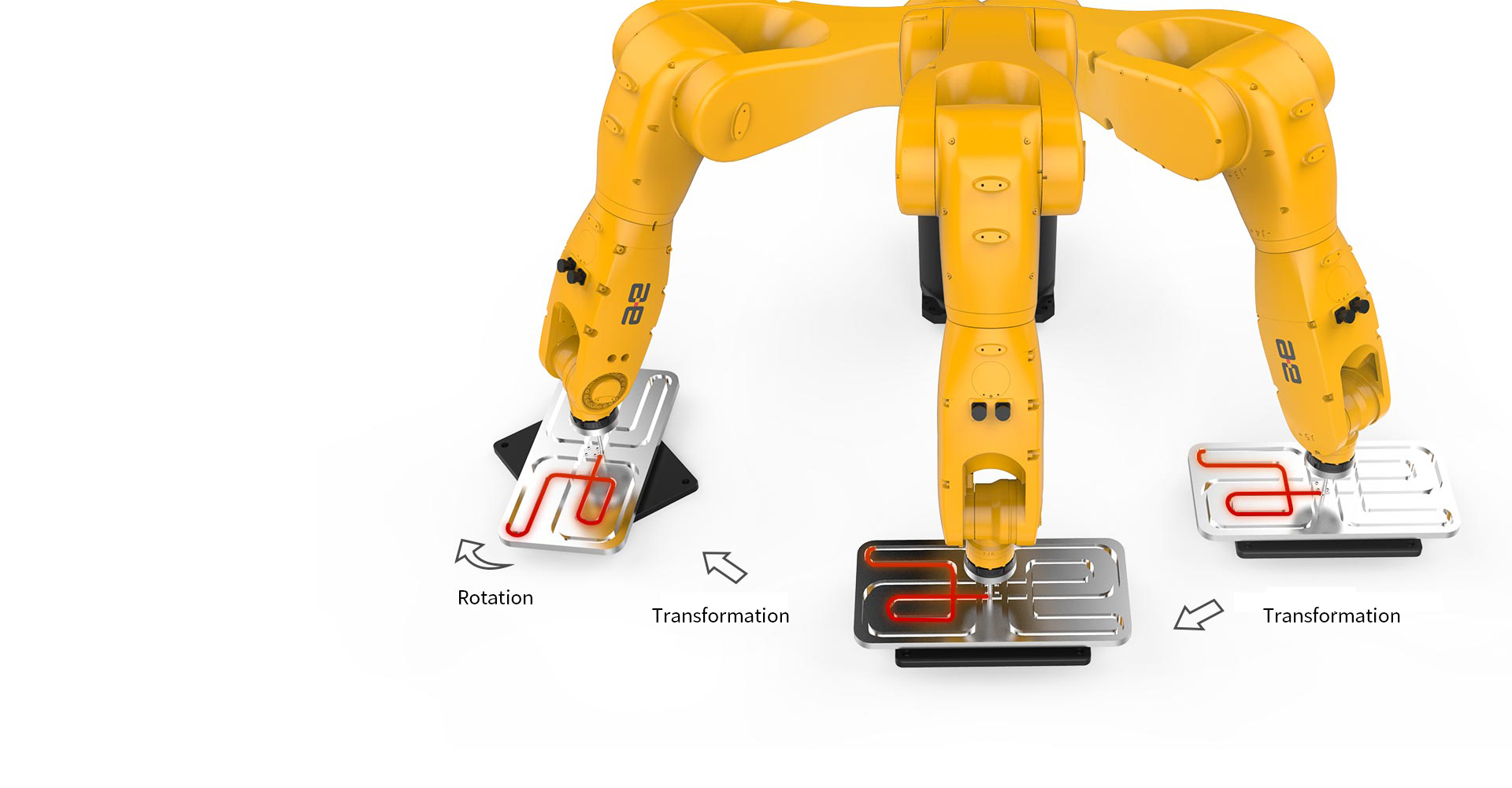
Смещение траектории
Через смещение и вращение траектории копировать её в новое положение.
Это уменьшает трудозатраты на обучение.
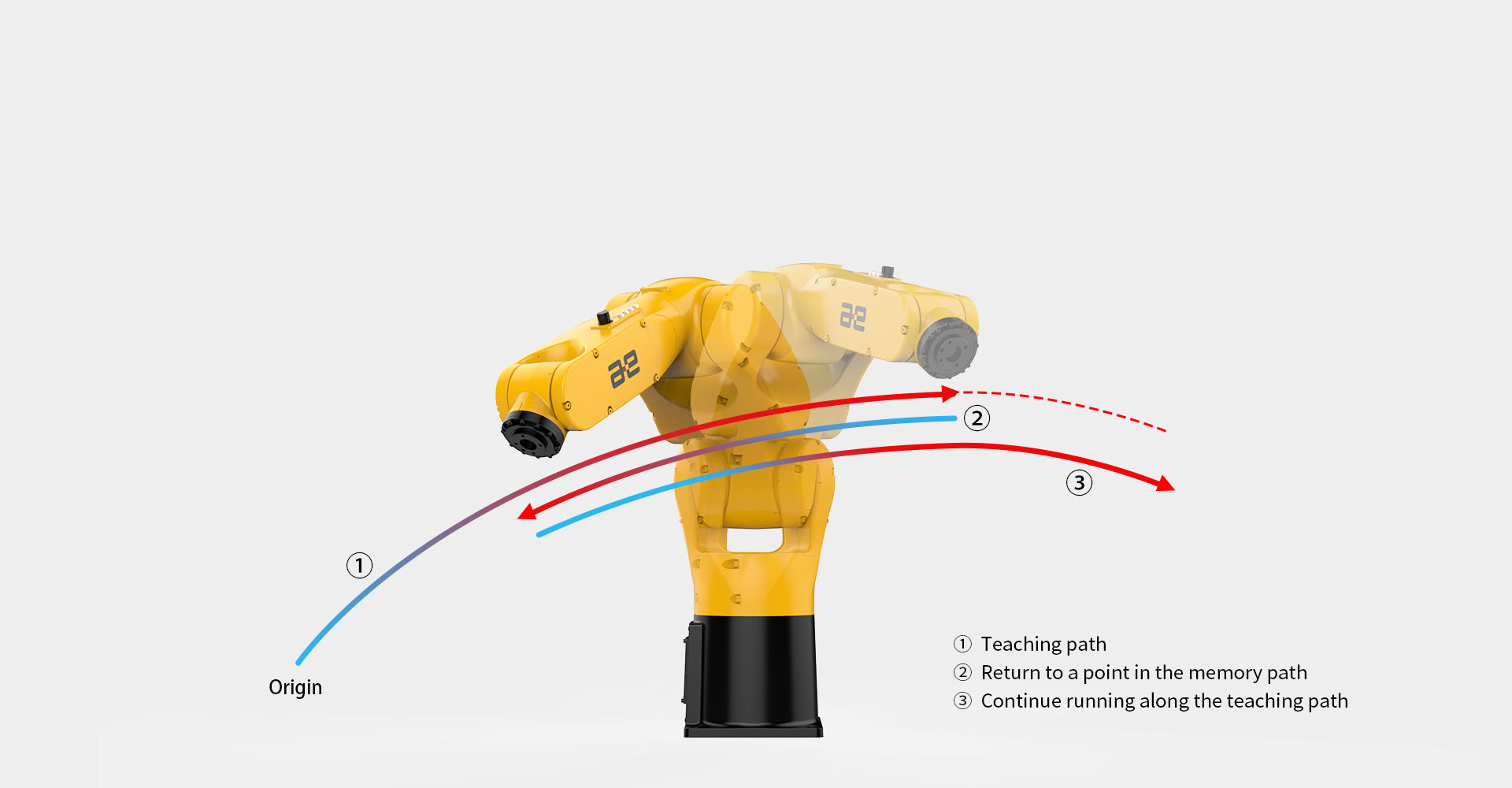
Запоминание траектории
Запись пройденной TCP траектории решает проблему отклонения робота от исходного пути программирования при его повторном запуске после остановки